Peng Zhang1,2, Yan Xu1, Ruizhi Chen2,1, Weiguo Dong2,3, You Li1,2, Rong Yu3, Mingyue Dong1, Zhengru Liu3, Yuan Zhuang1,2, Jian Kuang1
1 State Key Laboratory of Information Engineering in Surveying, Mapping and Remote Sensing, Wuhan University, Wuhan 430079, China
2 Institute of medical Informatics, Renmin Hospital of Wuhan University, Wuhan, China
3 Department of Gastroenterology, Renmin Hospital of Wuhan University, Wuhan, China
Published in IEEE Internet of Things Journal (2022), https://doi.org/10.1109/JIOT.2022.3176356

Abstract
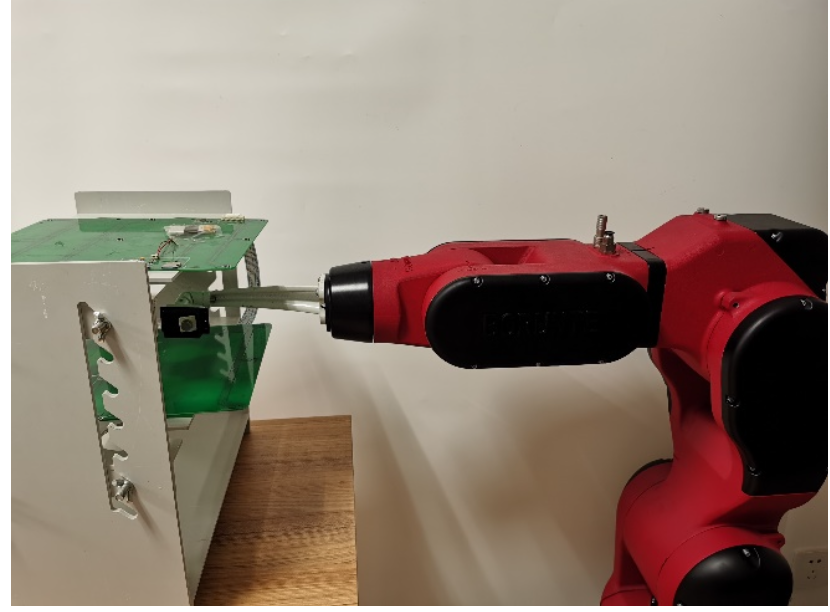
The wireless capsule endoscope (robot) has become more extensively used due to its comprehensive detection and patient-friendly experience. However, to provide better diagnostic information to medical staff, there is an urgent need for high- accuracy position information of capsule endoscopes during their working inside the human body. In this paper, a capsule endoscopy positioning system using a magnetic sensor array is designed. It has two advantages. (1) Most of existing magnetic positioning method needs to initialize the magnetic moment accurately, which is difficult to meet in practical applications. To solve this issue, this paper proposes a method to determine the magnetic moment direction based on an inertial measurement unit. The proposed methodcanaccurately estimate the direction of the magnetic moment even when the roll angle is singular. (2) This paper proposes a nonlinear least-squares algorithm for capsule magnetic positioning based on the three-axis magnetometer observation. The algorithm is more robust than the Levenberg-Marquardt (LM) method that is widely used in capsule endoscopy positioning. Furthermore, its computation speed is over 100 times faster than the LM method, which successfully meets the real-time requirements. In this research, a three-axis mechanical platform and a six-axis robot arm are used to build a capsule magnetic positioning evaluation system. Preliminary results show the accuracy (RMS) of the proposed capsule endoscope positioning algorithm was better than 6 mm.